Description
The table at the top of the Attributes tab lists the number of voxel blocks currently selected. The Voxel frame provides three attributes used by the voxel algorithm to control voxel refinement during initialization.
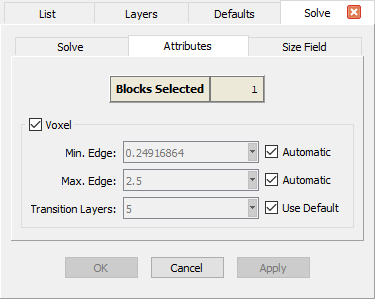
Use the Min. Edge and Max. Edge attributes to specify the desired minimum and maximum edge lengths for voxel cells, respectively. By default, these values are determined automatically from the domains used as size field influencers and the extents of the block. Uncheck the Automatic checkbox to edit the values.
Note: Voxel cells are created by iteratively subdividing larger cells to satisfy the Size Field. The Min. Edge parameter is used in two ways. First, an initial number of subdivisions is chosen for the extents of the block that best matches the value prescribed for Min. Edge. These initial voxel cells are then refined to satisfy the value prescribed for Max. Edge. Secondly, the Min. Edge parameter is used as the lower limit to stop the refinement process. The actual voxel edge lengths may vary below this value, but not by more than one refinement level. When not using automatically determined values, it is recommended to set both Min. Edge and Max. Edge to be related by powers of 2 in order to avoid confusion.
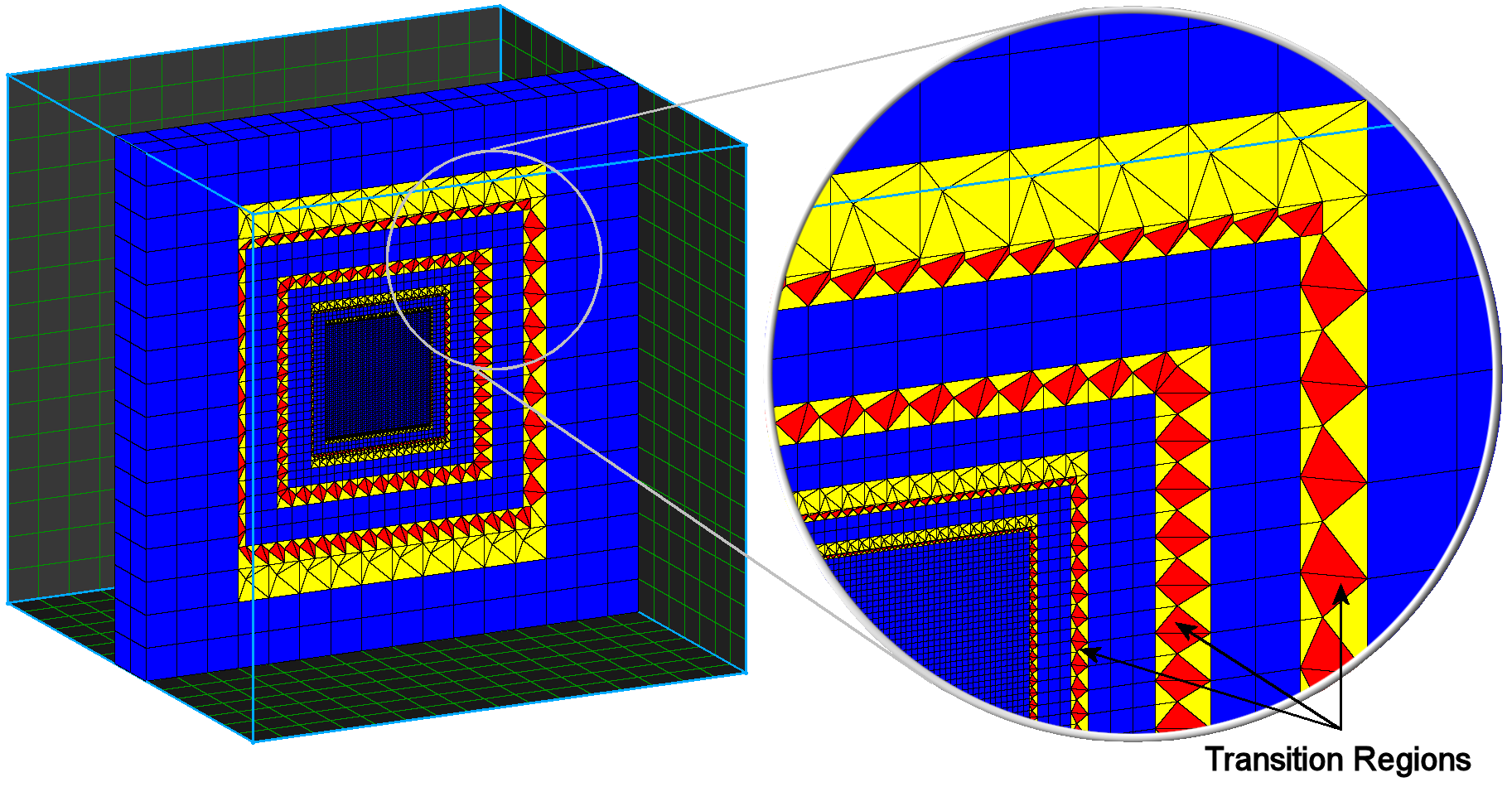
The Transition Layers attribute specifies the target the number of layers of equally-sized (i.e. isotropic) hexahedral cells placed between two consecutive transition regions in a voxel block. The default value for Transition Layers is 5. Uncheck the Use Default checkbox to edit the value. The image below shows an example of the transition regions in a voxel block where hexes are clustered in the region of a Box source (source not shown).
Note: Since true voxel cells (i.e. hexahedra with hanging edge nodes) are not a supported volume cell type in Fidelity Pointwise, some of the voxel cells are subdivided into tetrahedra and pyramids in order to transition between voxels of different sizes. The result is a block that contains only isotropic Cartesian-aligned hexahedra, pyramids, and tetrahedra.